Effective indoor navigation using beacons requires the optimal placement of emitting devices and the selection of appropriate localization algorithms to ensure high accuracy. This post is the first part of a series focusing on my research into indoor localization.
In this part, I describe the modeling of signal loss as a function of distance, which is a key element in the localization process for algorithms based on estimating the distance from a known emitter position.
In future posts, I will discuss selected localization algorithms, highlighting their accuracy and effectiveness in various scenarios. I will also address the topic of beacon placement, analyzing how it impacts the efficiency of the localization process. This series aims to provide a comprehensive overview of indoor localization using beacons.
Introduction to Indoor Localization
Localization in mobile devices enables determining the geographical position of a device with an accuracy of a few meters, which is essential for many applications such as maps, shopping, or transportation systems. Traditionally, localization relies on GPS signals or other satellite navigation systems (GLONASS, Galileo, BeiDou). However, GPS effectiveness is limited in indoor environments, where the signal may be weak or unavailable due to architectural obstacles.
An alternative to satellite-based technologies is the use of Bluetooth, which allows communication over distances of up to several meters. In the context of localization, this technology is implemented by deploying beacons within buildings. These devices emit signals at regular intervals using Bluetooth Low Energy (BLE) technology, an energy-efficient extension of the Bluetooth standard. Mobile devices equipped with Bluetooth modules and a dedicated application can precisely determine their location by measuring the distance from multiple beacons simultaneously. This makes it possible to accurately track positions even in areas where GPS signals are weak or entirely unavailable.
BLE-based localization uses various algorithms to estimate the receiver’s position. Each algorithm differs in terms of accuracy and computational complexity. A common factor in most methods is converting the RSSI (Received Signal Strength Indication) value into the distance between the receiver and a beacon. Based on this, the receiver’s position is determined. At this stage, we will not delve into the details of localization algorithms—these will be discussed in a subsequent post. Instead, this post focuses on interpreting signal strength in relation to distance for the RSSI indicator, which will serve as a foundation for further research and the implementation of navigation algorithms in the future.
What is RSSI and What Role Does It Play?
The RSSI (Received Signal Strength Indication) plays a crucial role in the localization process using beacons, as it allows the estimation of the distance between the emitter and the receiver based on the strength of the received radio signal. Its value, which depends on the distance and transmission power (TX), is susceptible to disturbances caused by absorption, interference, or diffraction. In RSSI research, the signal strength is converted into distance using logarithmic models of radio path loss. A common model is based on the equation:
RSSI = −10nlog10(d) + A
After transformation, it can be expressed as:
d = 10(A-RSSI/10n)
Here, A represents the RSSI value at a distance of 1 meter, and n is an environmental constant accounting for signal disruptions (typically ranging from 1 to 4 for indoor environments). The accuracy of localization depends on the correct selection of the parameters A and n, which requires empirical determination through a dedicated experimental study.
The Relationship Between RSSI Strength and Distance
Experiment
To accurately study how the RSSI value changes with distance from the emitter, an experiment was conducted under controlled conditions. The goal was to collect data necessary to develop a regression model for signal loss, which, as previously mentioned, forms the foundation of localization algorithms.
The experiment involved performing a series of static measurements of RSSI values at various distances from the emitter, ranging from 1 to 20 meters, with 1-meter increments. For each measurement point, 100 RSSI readings were collected, allowing for detailed data analysis and minimizing the impact of random interference.
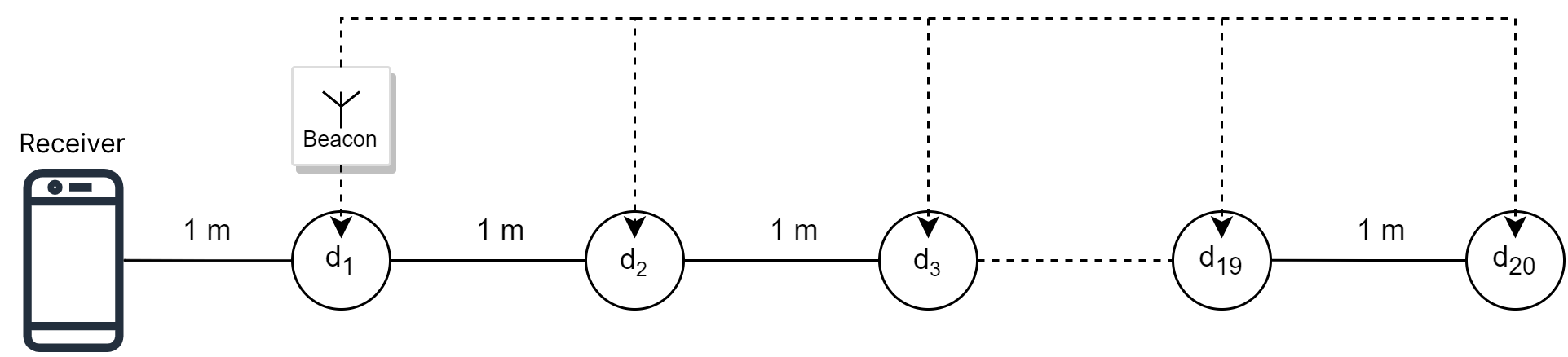 Setup of devices in the experiment
Setup of devices in the experiment
The mobile device was mounted on a tripod to ensure stability during measurement, while the beacon was positioned at designated points along a straight line. The mobile device was equipped with a specially developed application that automatically collected RSSI readings and saved them in a CSV file for subsequent data analysis. To minimize the effect of signal reflection, the experiment was conducted at least 5 meters away from walls.

Measurement of RSSI Values in the Experiment
Determining the Logarithmic Regression Model
After exporting the CSV data from the mobile device, the data was aggregated into a single table containing RSSI values for individual points (d1,d2,…,d20d_1, d_2, …, d_{20}). Each RSSI reading represented the result of 100 measurements at a given point, enabling the calculation of average values with a low standard deviation of 1.96 dBm. The data was then imported into the RStudio environment, where average RSSI values and their standard deviations were calculated for each point.
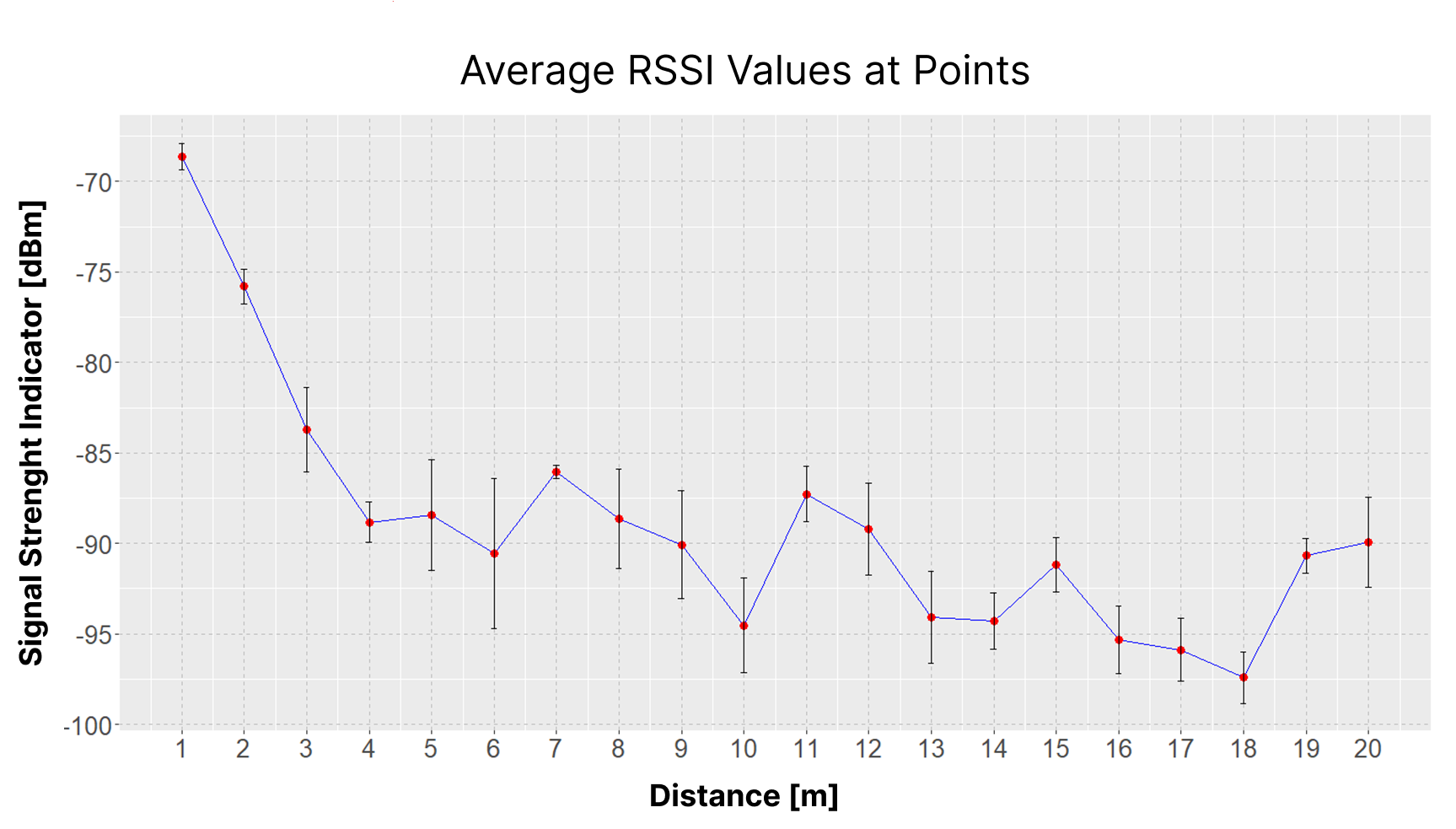 Average RSSI Values with Standard Deviation as a Function of Distance
Average RSSI Values with Standard Deviation as a Function of Distance
A plot of these values against distance confirmed that average RSSI values decreased as the distance from the beacon increased. This result aligned with expectations for a logarithmic model of signal loss with distance. In indoor environments, radio signal propagation is influenced by numerous interfering factors, leading to a complex signal strength profile. This profile varies over time and exhibits significant fluctuations, making precise distance estimation challenging. To effectively use RSSI for positioning purposes, preprocessing of the values was applied. This involved filtering the data using Gaussian and Kalman filters, which smoothed the RSSI readings and reduced noise-induced fluctuations. To develop a mathematical model of the relationship between distance and RSSI, logarithmic interpolation of the data was performed.
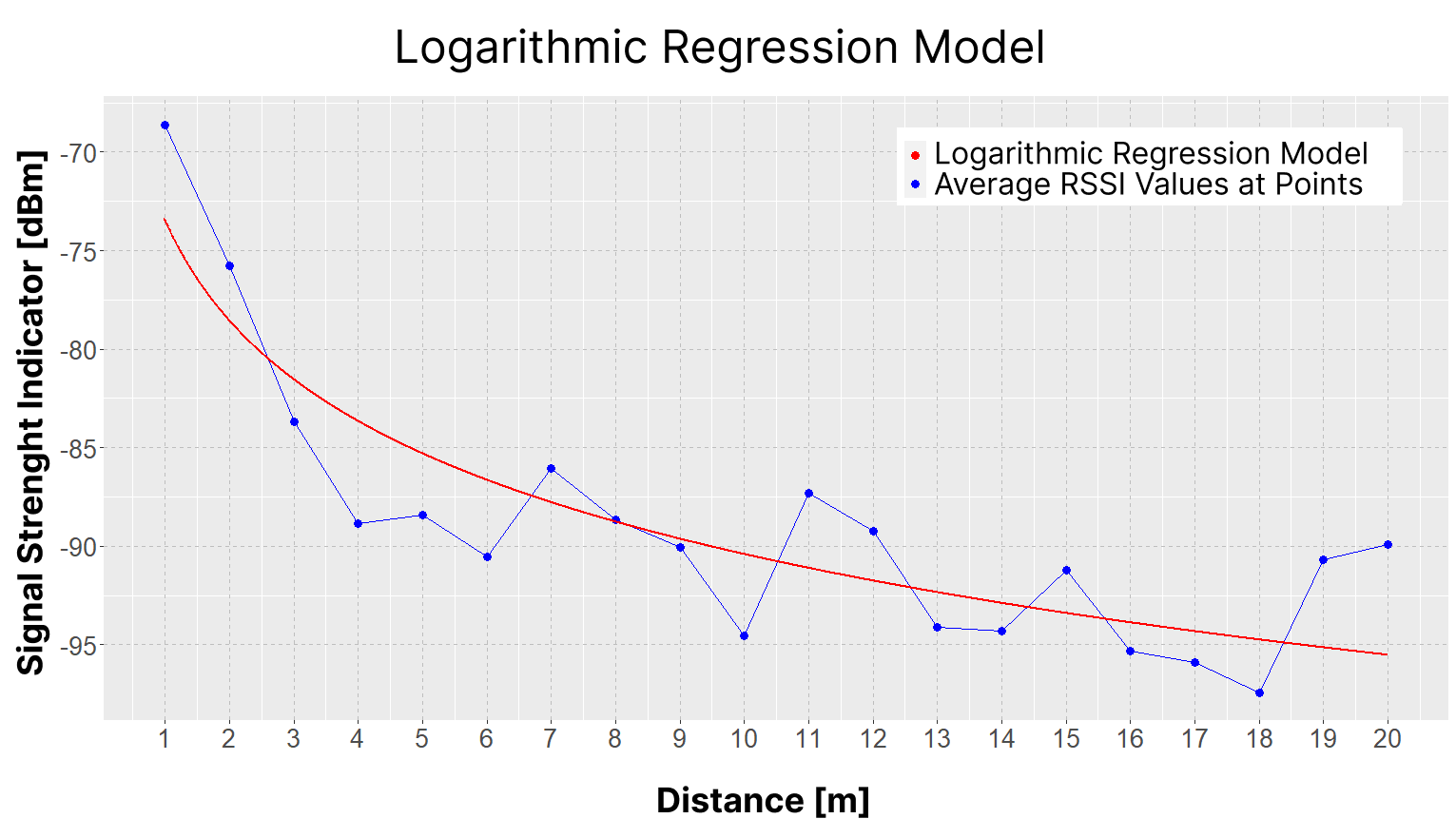 Logarithmic Regression Model of RSSI Values
Logarithmic Regression Model of RSSI Values
The results of this interpolation, presented on the graph, were used to determine the two parameters of the model: A and n. These parameters were calculated as A= -73,01252 and n=1,724047, confirming theoretical assumptions about signal dispersion within a building. Finally, the determined logarithmic regression model can be expressed with the equation:
RSSI = -17,24047log10(d) – 73,01252
From Regression Model to Distance Estimation
Determining the logarithmic regression model is a key step in understanding how radio signals behave in the studied environment. However, the model itself is just the beginning. It serves as the foundation for implementing a method that converts RSSI values into distance estimates between a mobile device and a beacon.
 Implementing the Distance Calculation Method
Implementing the Distance Calculation Method
The method, shown in the code snippet above, transforms RSSI values into distance estimates using the derived logarithmic model equation. This provides a ready-to-use tool that can be directly integrated into localization algorithms. This method becomes an integral part of the process for determining the mobile device’s position. Localization algorithms such as trilateration or the min-max method will use this function to calculate distances between the mobile device and multiple beacons. Based on this data, the algorithm can determine the device’s position in the space.
Next Step
In the next stage, we will focus on analyzing and testing localization algorithms that utilize the obtained distance data to determine the position of the mobile device. This research will include an examination of various methods, their characteristics, and accuracy assessments. The primary objective will be to compare the results produced by the algorithms with the actual position of the device, enabling the identification of effective solutions. This topic will be discussed in detail in the next post in this series.
Literature and Sources
- L. Guoquan, E. Geng, J. Lin, i Y. Pang, “Indoor Positioning Algorithm Based on the Improved RSSI Distance Model”, 2018, doi: 10.3390/s18092820
- C. Song, A. Renbo i D. Zhengzhong, “An Indoor Positioning Algorithm using Bluetooth Low Energy RSSI”, 2016, doi: 10.2991/amsee-16.2016.72. 3.
- Charts and Figures – Own work.




